Interfaz eléctrica del USB
| ||||||

Interfaz eléctrica del USB. Bus Serie Universal, más conocido por sus siglas en inglés: USB, y hizo su primera aparición en 1995. Todos los protocolos y códigos de programas en el mundo no son útiles si las señales no mantienen el cable en buenas condiciones. La interfaz eléctrica juega un papel fundamental en hacer que un USB sea confiable para transmitir información.
Desde el punto de vista práctico, si se emplean componentes y cables dóciles, no es necesario saber mucho acerca de la interfaz eléctrica. Se pueden usar los productos y confiar que los diseñadores hayan hecho un buen trabajo. Pero si se diseña transceptores USB o cables, pizarras con circuitos impresos con interfaz USB o un analizador protocolar tiene que monitorear el circuito, si se necesitara entender la interfaz eléctrica y cómo se aplica al proyecto.
Nociones sobre el funcionamiento del USB
Un sistema USB tiene un diseño asimétrico, que consiste en un solo servidor y múltiples dispositivos conectados en una estructura de árbol que utiliza concentradores o Hub especiales. El estándar incluye la transmisión de energía eléctrica al dispositivo conectado. Algunos dispositivos requieren una potencia mínima, por lo que se pueden conectar varios sin necesitar fuentes de alimentación extra. La mayoría de los concentradores incluyen fuentes de alimentación que brindan energía a los dispositivos conectados a ellos.
El bus USB es síncrono, y emplea el algoritmo de codificación NRZI (No Retorno a Cero Invertido). En este sistema existen dos voltajes opuestos, una tensión de referencia corresponde a un "1", pero no hay retorno a cero entre bits, de forma que una serie de "unos" corresponde a un voltaje uniforme, en cambio los ceros se marcan como cambios del nivel de tensión, de modo que una sucesión de ceros produce sucesivos cambios de tensión entre los conductores de señal.
El controlador USB instalado en el ordenador, denominado controlador Host o Concentrador Raíz, proporciona un enlace entre el bus de la placabase y una o más conexiones iniciales con el exterior. A partir de éstas, utilizando concentradores adicionales, pueden conectarse más dispositivos. El bus USB soporta intercambio simultáneo de datos entre un ordenador anfitrión y un amplio conjunto de periféricos.
Todos éstos conectados comparten el ancho de banda del bus por medio de un protocolo de comunicación de Testigos. El controlador USB distribuye testigos por el bus y el dispositivo, cuya dirección coincide con la que porta el testigo, responde aceptando o enviando datos al controlador.
La topología del bus USB adopta forma de estrellas apiladas y se organiza por niveles, lo que permite el funcionamiento simultáneo de 127 dispositivos que incluyen los Hubs. En la raíz o vértice de las capas, está el Host. Dicha topología permite a muchos dispositivos conectarse a un único bus lógico sin que los que se encuentran más abajo en la pirámide sufran retardo.
A diferencia de otras arquitecturas, USB no es un bus de almacenamiento y envío, de forma que no se produce retardo en el envío de un paquete de datos hacia capas inferiores. En la figura 1 se puede ver la estructura del bus.
El sistema USB consta de tres componentes fundamentales: el Host, los Hubs o Concentradores, y los Periféricos o Funciones.
Host
Procesa y gestiona los cambios de configuración que puedan ocurrir en el bus durante su funcionamiento. Este gestiona el sistema y los recursos del bus, tales como el uso de la memoria del sistema, la asignación del ancho de banda del bus y su alimentación. También ayuda al usuario con la configuración automática de los dispositivos conectados y reacciona cuando son desconectados. Puede soportar uno o más buses USB, y estarán conectados al Host por medio de un Controlador del Host.
El controlador del Host
Comienza las transferencias en el bus y es el maestro en un bus USB. En la arquitectura USB sólo hay un controlador del Host por cada bus USB y por eso no hay arbitrariedad para el acceso al bus. Las funciones básicas del controlador del Host son:
-Detectar la inserción o desconexión de dispositivos USB.
-Gestionar el flujo de control y el flujo de datos entre el Host y los dispositivos.
-Coleccionar estadísticas de actividad y estado.
-Proveer una cantidad limitada de energía a los dispositivos conectados.
El controlador se comporta como un bus maestro PC (Conector de Componentes Periféricos) multicanal programable para dar soporte a las necesidades de transferencia de datos de múltiples dispositivos conectados al bus USB. En la figura 2 se muestra un esquema del controlador del Host.
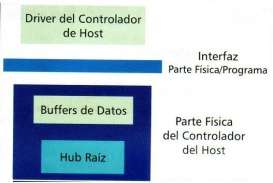
Analizando la figura 2 se plantea que la parte del programa consiste en el Controlador de Dispositivos (Driver) del Controlador del Host (HCD). Este programa interactúa con la parte física del Controlador del Host por medio de la interfaz. La parte física del controlador del Host consiste en un Hub raíz que proporciona los puertos USB y los buffers de datos donde son almacenados cuando son movidos hacia y desde memoria.
Los Hubs
Un bus tradicional puede ser dividido en segmentos de bus individuales conectados por puentes. Los Hubs son elementos claves en la arquitectura del USB, ya que incrementan los puntos de conexión por medio de puertos adicionales, detectan la conexión y desconexión de dispositivos y generan alimentación hacia los dispositivos.
El Hub dispone de un Repetidor, para pasar información entre el puerto de subida (hacia el ordenador) y los puertos de bajada (hacia los dispositivos), y de un Controlador que incorpora un juego de registros mediante los cuales el Controlador USB configura el Hub, controla y monitoriza los puertos de bajada. En la figura 3 se muestra un Hub.
La arquitectura interna de un Hub USB 1.x consta de un Repetidor Hub y un Controlador del Hub, mientras que para la versión USB 2.0 hay un tercer elemento: traductor de transacciones que proporciona los mecanismos que dan soporte a los dispositivos de media y baja velocidad por el Hub, mientras se transmiten todos los datos entre el Host y el Hub en el modo de la alta velocidad.
Interfaz eléctrica
Para que el USB realice correctamente su función, la interfaz eléctrica debe cumplir ciertos requerimientos.
Tranceptores y Señales
Las propiedades eléctricas de las señales cargadas por un cable USB varían al depender de la velocidad del segmento del cable. Cada señal de baja, media y alta velocidad tiene un coeficiente de canto diferente, que es una medida de las veces que se eleva o disminuye, o la cantidad de tiempo requerido para que una salida cambie.
Los transceptores y los circuitos de apoyo que producen, detectan las señales del bus y también varían al depender de la velocidad. A cualquier velocidad, los componentes que se conectan a un cable USB tienen que ser capaces de resistir el corto circuito de cualquier línea a cualquier otra línea o la protección del cable sin dañar los componentes.
Segmentos de cable
Consiste en un cable físico simple que conecta un dispositivo (puede ser un Hub) a un Hub de corriente arriba (puede ser el Hub raíz en el Host). La velocidad, el coeficiente de canto y la polaridad de los datos en un segmento dependen si el segmento tiene baja, media o alta velocidad. En la figura 4 se muestra esa relación.

Los segmentos de baja velocidad existen sólo entre los dispositivos de baja velocidad y sus Hubs. Un segmento de baja velocidad carga únicamente datos de baja velocidad con el empleo del coeficiente de canto de baja velocidad y la polaridad invertida comparada con la media velocidad.
Un segmento de media velocidad existe cuando el dispositivo de corriente abajo es de media velocidad. El dispositivo de corriente arriba puede ser un Hub de 1.x ó 2.0. Cuando el dispositivo de corriente abajo es un Hub, el segmento puede también cargar datos hacia y desde dispositivos de baja velocidad que son corriente abajo desde ese Hub.
Cuando esto ocurre, los datos de baja velocidad en el segmento de la de media emplea coeficiente bit de baja. El Hub que se conecta a un dispositivo de baja velocidad se transforma entre la polaridad de la baja y media velocidades y los coeficientes de canto. Los segmentos de media velocidad nunca cargan datos de velocidad alta. Si un dispositivo de alta velocidád se conecta a un Hub de 1.x, las comunicaciones estarán a velocidad media. Los dispositivos de alta velocidad tienen al menos que responder a una petición de numeración a media velocidad.
Los segmentos de alta velocidad existen sólo donde el dispositivo de corriente arriba sea un Hub de 2.0 y el dispositivo de corriente abajo sea de alta velocidad. Cuando el dispositivo de corriente abajo es un Hub, el segmento puede también cargar datos hacia y desde dispositivos de baja y media velocidades que sean corriente abajo desde ese Hub.
Los datos en el segmento de alta velocidad viajan a alta velocidad, y el traductor de la transacción en el Hub corriente abajo se transforma entre la velocidad baja o media y la alta como se necesite.
En la unión, todos los dispositivos tienen que comunicarse a baja o media velocidad. Cuando es posible, un dispositivo de alta velocidad transita de media a alta durante una vibración de alta velocidad.
Identificación de la velocidad del dispositivo
Para poder iniciar cualquier tipo de transacción cuando se conecta el dispositivo al Host, es necesario que éste conozca la velocidad a la que trabaja. Con esa finalidad existe un mecanismo a nivel eléctrico. La diferencia entre los dispositivos de velocidad media y los baja, es que en la media tiene una resistencia conectada al D+, en velocidad baja la misma resistencia se encuentra en D- como se puede observar en la figura 5.
De forma que después del Reset, el estado de reposo de la línea es diferente si se trata de baja o media velocidad. En el caso de dispositivos de alta velocidad lo que se hace es que en un principio se conecta como un dispositivo de velocidad media y más tarde por medio de un protocolo se pasa a velocidad alta.
Alta Velocidad
A alta velocidad existe un Diferencial 1 en el driver cuando la salida D+ sea al menos 0.36 V y la salida D- no sea mayor que 0.01 V, referido a la señal a tierra del driver. Existe un Diferencial 0 en el driver cuando D- sea al menos de 0.36 V y D+ no sea mayor que 0.01 V, referido a la señal a tierra del driver.
En un receptor de alta velocidad, la entrada tiene que encontrar las exigencias mostradas en las plantillas modelos en la descripción. Los modelos especifican los voltajes máximos y mínimos, los tiempos de elevación y de disminución, el jitter máximo en una señal transmitida y el máximo que un receptor tiene que tolerar (ver Tabla 1).
| Parámetros | Baja y Media Velocidad | Alta Velocidad |
| V salida mínimo bajo | 0 | -0.010 |
| V salida máximo bajo | 0.3 | 0.010 |
| V salida mínimo alto | 2.8 | 0.360 |
| V salida máximo alto | 3.6 | 0.440 |
| V entrada máximo bajo | 0.8 | Los límites se definen por las plantillas modelos |
| V entrada máximo alto | 2.0 |
La descripción muestra también los detalles de cómo hacer las mediciones.
Cables y conectores
Para facilitar la conexión de dispositivos de cara al usuario, USB utiliza dos tipos de conectores totalmente diferentes: los de serie A y los de serie B, que se muestran en la Figura 6 con sus medidas en milímetros.

Los conectores de serie A permiten la conexión directa de dispositivos USB con el Host o con el puerto de bajada de un Host, y es obligatoria su presencia en todos los dispositivos y Hubs USB. Los conectores de serie B no son obligatorios y sirven para conectar un cable USB con el puerto de subida de un dispositivo, permitiendo por parte de los fabricantes de dispositivos la utilización de cables estándar USB.
El cable USB consta de cuatro conductores: dos de potencia y dos de señal, D+ y D-. Los cables de media y alta velocidad están compuestos por un par trenzado de señal, además de GND (Tierra) y Vbus (ver la Tabla 2).
| Pin | Nombre | Descripción | Color |
| 1 | VBUS | + 5 V. CC | rojo |
| 2 | D- | Data - | azul |
| 3 | D+ | Data + | amarillo |
| 4 | GND | Tierra | verde |
Existen tres tipos de cables USB: estándar (comúnmente llamado "de quita y pon"), fijo de media y alta velocidad, y cable fijo de baja velocidad.
Cable estándar "de quita y pon"
Se trata de un cable de velocidad alta y media, con un conector macho de Serie A en un extremo y un conector macho de Serie B en el otro extremo (Figura 7).
Cable fijo de velocidad alta y media
La denominación de fijo se refiere a los cables que son proporcionados por el fabricante del dispositivo fijos a éste, o bien sin ser fijos, con un conector específico del fabricante (ver figura 8).
Es obligatorio que en un extremo tenga un conector macho de Serie A. Dado que lo suministra el fabricante, puede ser utilizado por dispositivos tanto de velocidad alta y media, como de baja. En el caso que se emplee para un dispositivo de velocidad baja deberá cumplir todos los requisitos propios de esta velocidad.
Cable fijo de velocidad baja
Al igual que el cable fijo de alta y media velocidad tiene un conector macho de Serie A en un extremo, mientras que el otro depende del fabricante. La diferencia es que este tipo de cables sólo funciona con dispositivos de velocidad baja. En la figura 8 se muestra su representación.
Asegurando la calidad de la señal
Las descripciones para los drivers, receptores y diseño de cables aseguran que virtualmente todos los datos y sus transferencias ocurran sin errores. Las exigencias que ayudan a asegurar la calidad de la señal incluyen el empleo de líneas balanceadas y cables protegidos, partes torcidas requeridas para cables de media/alta velocidad y coeficiente de canto más lento para los drivers de baja velocidad.
Fuentes de ruido
El ruido puede entrar en un alambre de varias formas, incluso mediante el acoplamiento conductivo, magnético, capacitivo, electromagnético y de impedancia común. Si un voltaje de ruido es lo suficientemente grande, y si está presente cuando el receptor intenta detectar un bit transmitido, el ruido puede causar que el receptor lea inapropiadamente el nivel lógico recibido.
El acoplamiento conductivo y la impedancia común requieren contactos óhmicos entre la señal del alambre y el alambre que es la fuente de ruido. El acoplamiento conductivo ocurre cuando un alambre trae el ruido de otra fuente al circuito. El acoplamiento de impedancia común sucede cuando dos circuitos comparten un alambre, como el de regreso a tierra.
Los otros tipos de acoplamiento de ruido resultan de la interacción entre los campos eléctricos y magnéticos de los alambres mismos y las señales que acoplan dentro de los alambres desde las fuentes exteriores, incluyendo otros alambres en la interfaz.
El acoplamiento capacitivo e inductivo puede causar cruzamiento de las informaciones, donde las señales en uno de los alambres entran en el otro. El acoplamiento capacitivo, también llamado eléctrico, ocurre cuando dos alambres se cargan con diferentes potenciales y resulta un campo eléctrico entre los alambres. La intensidad del campo y del resultado del acoplamiento capacitivo, varía con la distancia entre los alambres. El acoplamiento inductivo o magnético sucede porque la corriente en un alambre causa que éste emane un campo magnético. Cuando los alambres son mayores que 1/6 de longitud de onda, se aparta el acoplamiento capacitivo e inductivo y se considera junto como uno electromagnético. Un ejemplo de acoplamiento magnético es cuando un alambre actúa como antena receptora para ondas de radio.
Líneas Balanceadas
Una vía que emplea el USB para eliminar el ruido es con las líneas balanceadas que cargan las señales diferenciales del bus. Las líneas balanceadas están sosegadas eléctricamente. Cualquier ruido que acople en la interfaz es probable que también lo haga en ambos alambres de señales, pues el receptor detecta sólo la diferencia entre los voltajes de los dos alambres y cualquier ruido común a ambos se anula.
Por el contrario, en líneas no balanceadas con terminales simples empleadas por un RS-232 y otras interfaces, el receptor detecta la diferencia entre un alambre de señal y una línea a tierra compartida por otros circuitos. La línea a tierra es probable que esté cargando ruidos desde un número de fuentes, y el receptor vea este ruido cuando detecta la diferencia entre la señal del voltaje y de tierra.
Protección
La protección es más efectiva al bloquear el ruido debido a acoplamientos capacitivos, electromagnéticos y magnéticos de alta frecuencia. La especificación 2.0 requiere que ambos cables de baja velocidad y de media/alta estén protegidos, aunque las exigencias se diferencian para cada una de ellas. En un cable de media/alta velocidad una protección de aluminio poliéster metalizada cubre los cuatro conductores. Los rodea una protección exterior de alambre tejido de cobre estañado. Entre las protecciones, y en contacto, hay un alambre de cobre. La capa exterior es de cloruro de polivini. La protección termina en el conector.
El cable de baja velocidad posee las mismas exigencias, excepto que la protección exterior tejida se recomienda, pero es requisito. Las exigencias de protección se añadieron a la versión 2.0 no porque la interfaz USB sea ruidosa en ella misma, sino porque los cables sean probablemente anexados a las computadoras que son enteramente ruidosas. La protección ayuda a que los cables no emitan este ruido. Los cables dóciles de baja velocidad son más costosos de fabricar y físicamente menos flexibles.
La descripción deja al usuario los detalles sobre la conexión a tierra con el consejo de que el método conexión a tierra tiene que ser consistente con prácticas industriales aceptadas y regulaciones con respecto a la seguridad, la interferencia electromagnética, la interferencia radio-frecuencia y la descarga electrostática.
En un diseño típico, la protección es corriente alterna acoplada a una referencia local a tierra en cada terminación, con el empleo de un capacitor cerámico de 0,01 microfarad entre la protección y la tierra.
Aislamiento
El aislamiento galvánico puede ser útil para prevenir el ruido eléctrico y la energía que surge del acoplamiento de un circuito. Los circuitos que son aislados galvánicamente uno con el otro no tienen conexión óhmica. Los métodos típicos de aislamiento incluyen el uso de un transformador que transfiere la energía por medio del acoplamiento magnético y los opto-aisladores que transfieren las señales digitales por el acoplamiento óptico.
Un USB está diseñado como un bus de mesa y no requiere protección adicional en ambientes típicos. Las exigencias de tiempo del USB y el empleo de parejas simples de cables para ambas direcciones hacen que sea difícil aislar completamente un dispositivo USB de su Host. Sin embargo, es más fácil aislar el circuito que el controlador periférico conectado con el empleo de métodos convencionales. Por ejemplo: en un motor controlador con una interfaz USB, el motor y el circuito motor pueden ser aislados del controlador USB y del bus.
Un Hub típico tendrá un receptáculo serie B en su puerto de corriente arriba. El receptáculo acepta el conector serie B en un cable que se conecte con la raíz del Hub o a otro corriente arriba. Un Hub con puertos abajo externos tendrán una o más series A de receptáculos. Estos aceptan el conector serie A en los cables que conecten a los dispositivos u otros Hubs corrientes abajo.
Conclusiones
El USB ha resultado ser un gran avance tecnológico, gracias a sus características, sus potencialidades y a su facilidad de uso. Es un estándar que se ha apoderado del mercado con su mejor característica: sencillez. Ha alcanzado el éxito de modo que son muchos los periféricos que lo utilizan para comunicarse. Pero es importante que cada diseñador o persona que desee utilizar este bus para un proyecto determinado, conozca su funcionamiento y especificaciones eléctricas, para garantizar su correcto funcionamiento y aprovechar todas las ventajas que brinda.
Fuente
- Revista GIGA. Número 1. Año 2007